軟件截圖:
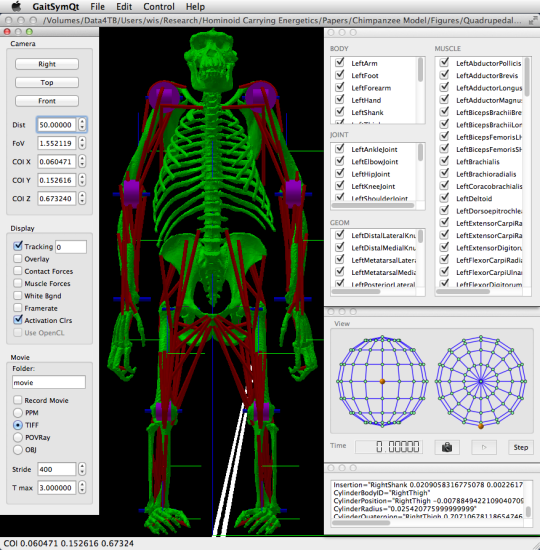
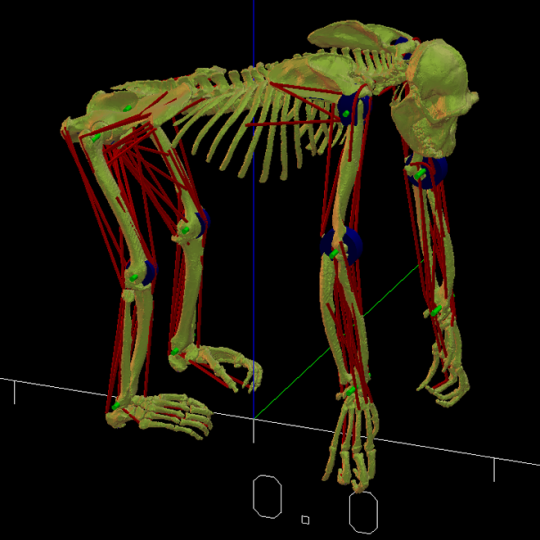
GaitSym是正向動態建模程序。這也就意味著您指定的部隊和程序使用牛頓定律來計算運動。你可以從這裡包括各種人類和非人類的2D和3D模型讓你開始下載。它採用了開放式動態引擎的物理引擎來完成大部分的辛勤工作,並提供文件格式和顯示系統,使用戶不必做任何編程。它也提供了各種肌肉模型,使得力可以直接從肌肉的活化水平要生成和多個鉤,以允許它與全局優化的工具,如遺傳算法中使用。其主要特點是:快速,靈活和強大的正向動態建模;複雜的聯繫制度; Minetti - 亞歷山大和Umberger-格里特森 - 馬丁肌肉模型代謝成本估算;通過點和氣缸包裝的肌肉路徑;慣性張量從三角網格大綱計算;全球或局部坐標為有效的模型創建系統。包括完整的源代碼(C ++編譯MacOSX上,Windows,Linux和其他Unix系統);完整的人類和非人類的2D和3D模型的品種;生產高品質的劇照,並通過外部光線追踪動畫
什麼在此版本中是新的:
- 新的滑動接頭
- 新的肌肉模型包括肌腱阻尼,激活動力學,非線性彈簧響應,以及更好的數值穩定性
- 新的兩廂車司機
- 新箱GEOM
- 新的肌肉帶,可以換輪兩個平行缸
- 直接點雲可視化
- 中止過度鉸接極限扭矩,或者數據目標閾值
- 跟踪位置可以抵消集中履帶式模擬

評論沒有發現